
Bioinspired Robotics and Evolutionary Computation
Natural systems often possess novel solutions to technological challenges we face today. These solutions have been perfected through evolution and effective implementation requires more than just mimicking the existing bio-system; it demands inspiration where one understands the underlying principles and adapts it to synthetic systems within the realm of current technological capabilities.
In our lab, we inspire from natural systems to designs robotic platforms that can perform climbing, walking, and swimming. We use Evolutionary Computation (EC) to optimize the performance and efficiency of these systems and come up with novel solutions to known but unsolved problems of engineering.
Evolutionary Computation is a subcategory of Artificial Intelligence (AI), which consists of algorithms that are inspired by Darwinian (biological) evolution. EC uses population-based meta-heuristic optimization/search algorithms called Evolutionary Algorithms (EAs). Evolutionary Algorithms (EAs) are known to be one of the most powerful problem-solving and optimization techniques.
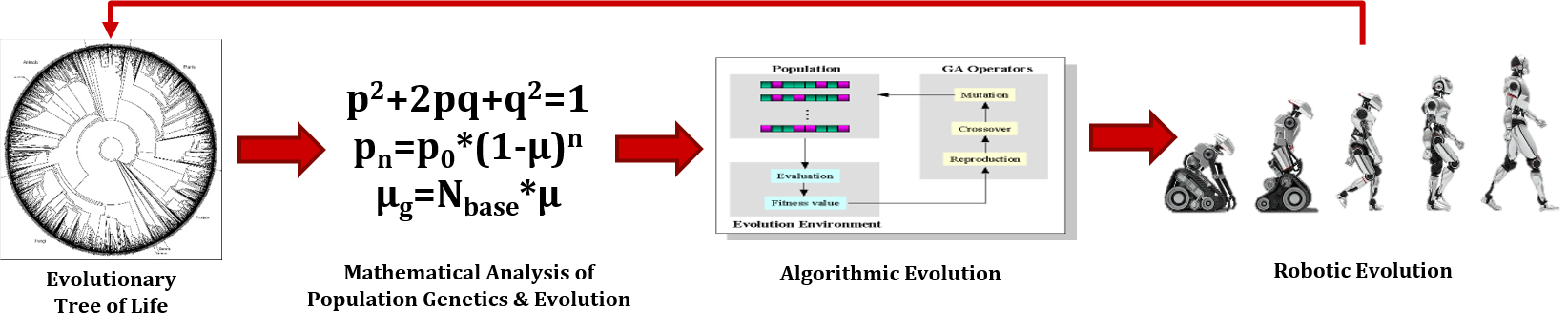
We not only use EAs as a tool to evolve novel behaviors and mobile robot controllers, but we also use these robotic platforms and their simulations to understand how evolution works at an algorithmic level. By doing so, we are hoping to discover new properties of evolutionary change and provide long-sought guidelines and tools for parameter selection to engineers who use EAs.
BIOMS Lab
-
Address
Texas Tech University, 2500 Broadway, Lubbock, TX 79409 -
Phone
806.742.2011 -
Email
webmaster@ttu.edu