
Multifunctional Active Surfaces
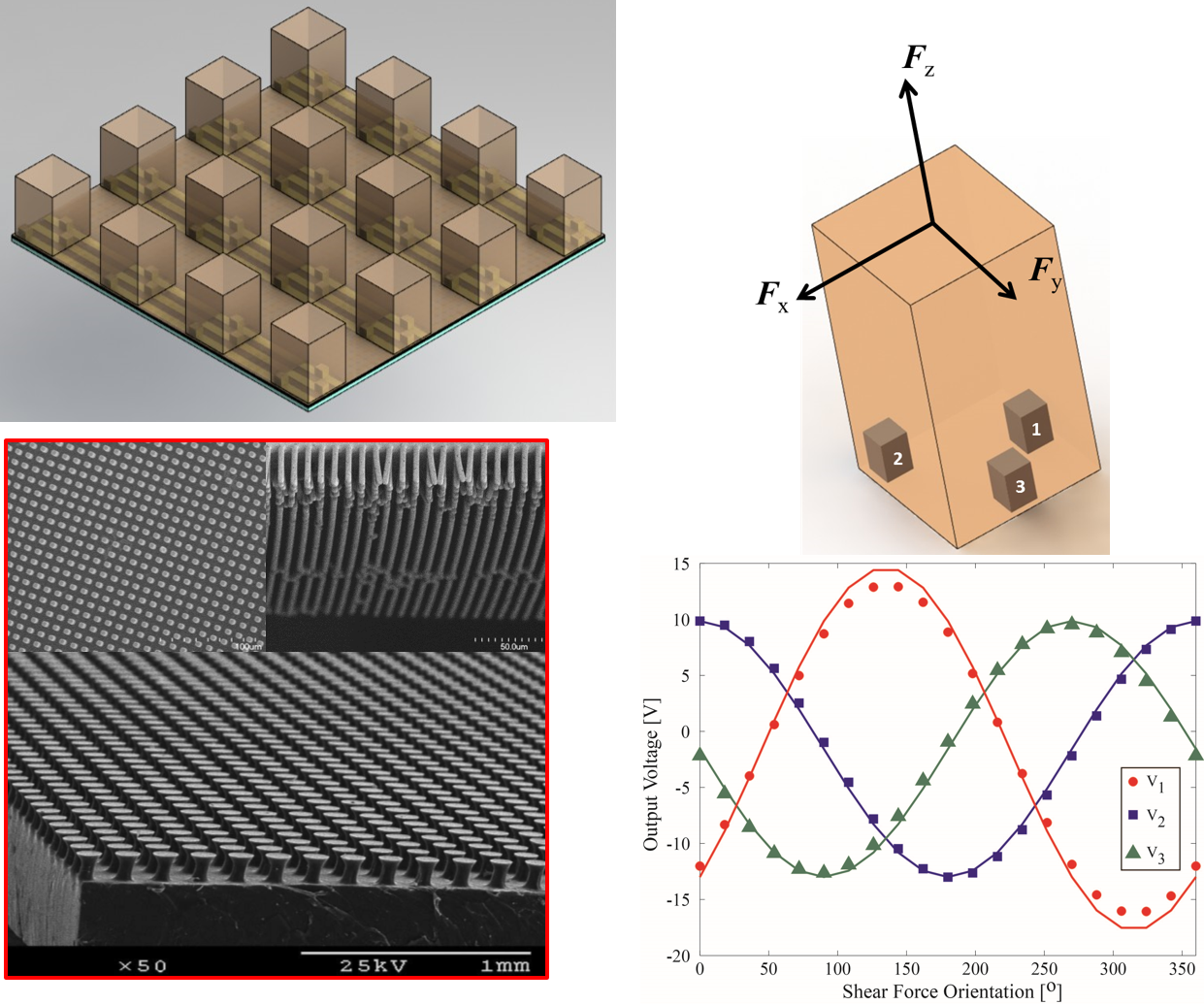
Miniaturization in robotics led to power efficient, agile, and impact resistant robots. Untethered miniature robots in particular, have the ability to reach limited access human-hostile environments for surveillance, inspection, sample collection, and search and rescue. However, the run time for most of the miniature robots is in the range of minutes which necessitates power efficient multifunctional system. In this context, we are developing multifunctional active surfaces for sensing, actuation, and energy harvesting based on composite piezoelectric microfibrillar structures. Creating multi-functional systems will lead to more power efficient and compact systems and will contribute greatly to the realization of miniature systems with sustainable on board power.
BIOMS Lab
-
Address
Texas Tech University, 2500 Broadway, Lubbock, TX 79409 -
Phone
806.742.2011 -
Email
webmaster@ttu.edu