
Building Guide
Most Frequent Building Mistakes
The instructions for the base robot in the 9797 LEGO NXT Education Kit is the best stating point for students. It allows for the most customization with arms, attachments, and sensors and the instructions come with each kit. There are a few common mistakes made by students and adults alike while building the base robot that prevent it from working correctly.
Step 6

The instructions are not very clear which pinhole on the smaller piece is supposed to be attached to the larger piece.

This is the common incorrect way students will complete Step 6. If the robot is built this way, then the NXT brick will be loose and the some of the beam pieces of the robot's base will have to be bent in order to fit.

This is the proper way to complete Step 6. As you can see, the pin goes in the corner pin hole on the smaller piece. Also the axle connects with the small L piece, which will keep the NXT brick steady.
Step 8
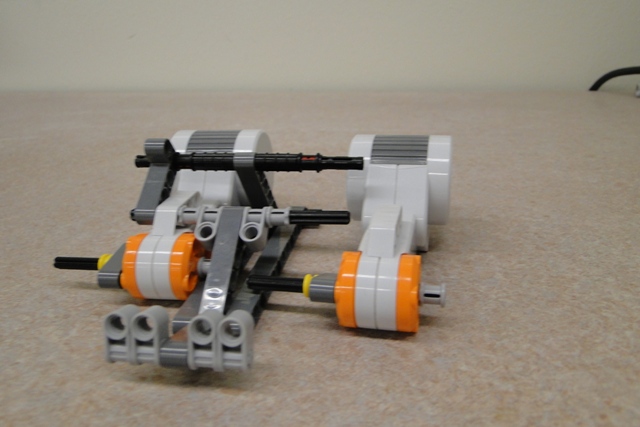
In Step 8, the students make a second motor piece which is supposed to mirror the first and attach to it. Students will often make the second motor identical to the first, with the axle sticking out the same direction. This makes it impossible for the motors to attach to each other, which is very frustrating for students.
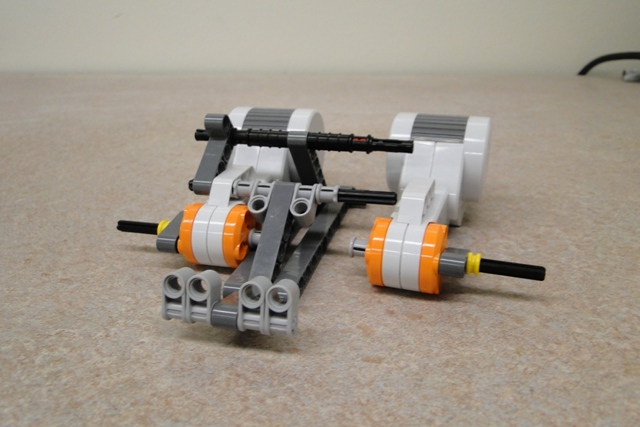
This issue has an easy fix as soon as the student realizes the motor should mirror the other. Just redo the sub-steps 1, 2, and 3 in Step 8.
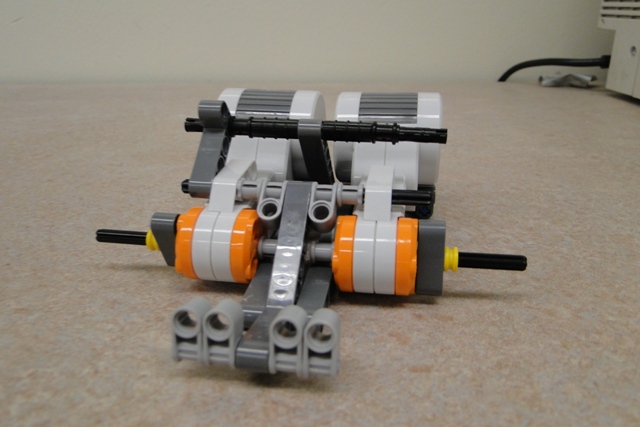
The picture above shows a properly completed Step 8.
Step 12

Step 12 is divided up into five sub-steps, which builds the swiveling back wheel of the robot. The wheel has two small L pieces (shown above). Students will often instinctively place the axle through the axle-shaped hole, resulting in pieces like this. The correct way to complete sub-step 3 is have the axle go through the pin hole, with the axle holes showing (seen below).

Without the axle holes to hold the swiveling axle, the back wheel will just fall right off.

Another common mistake in Step 12 is building the back wheel with the axle sticking out farther away from the wheel (shown above). This causes the robot to move awkwardly, as the back wheel cannot turn as widely as when the step is done correctly.

The picture above shows a properly completed Step 12.
Edward E. Whitacre Jr. College of Engineering
-
Address
100 Engineering Center Box 43103 Lubbock, Texas 79409-3103 -
Phone
806.742.3451 -
Email
webmaster.coe@ttu.edu